研究方向
1. 汽车人工智能
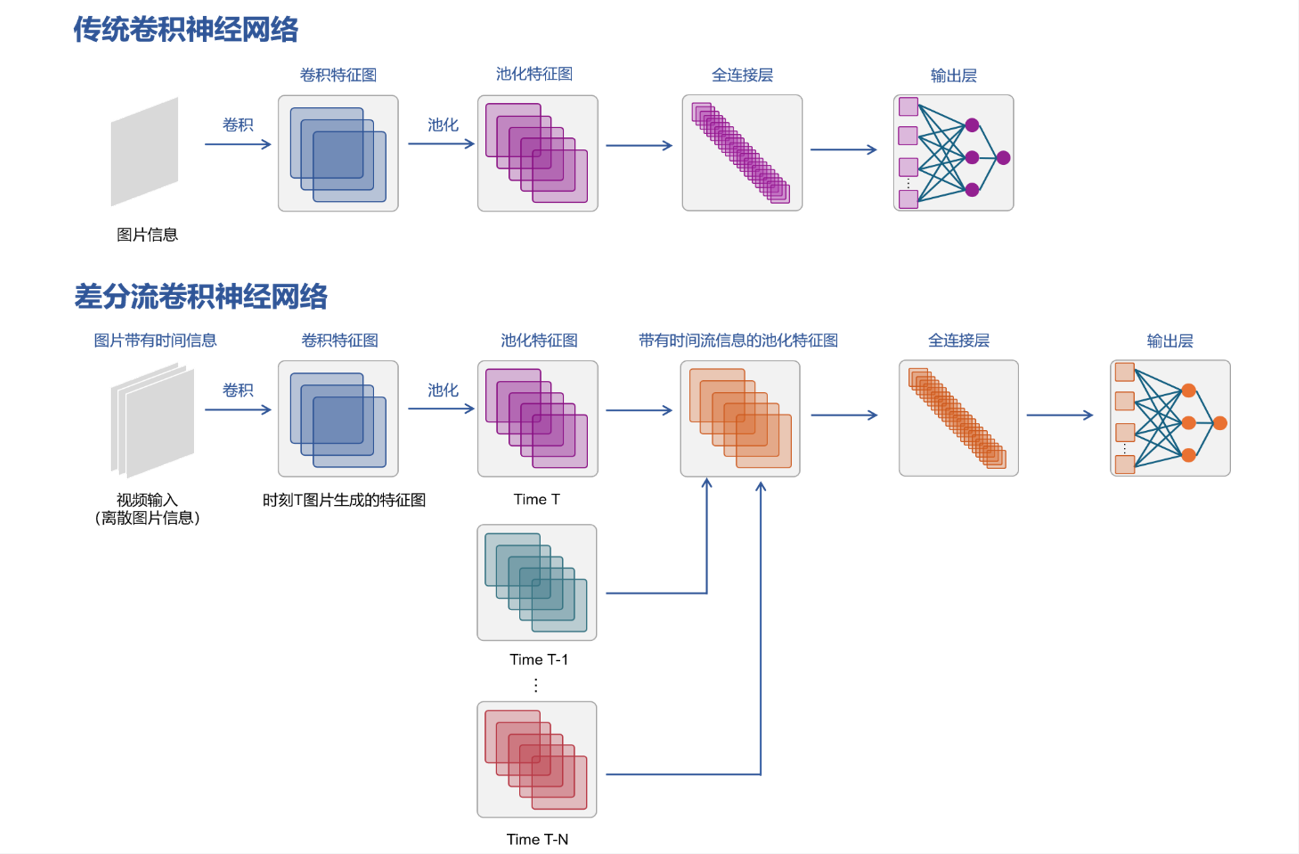
围绕智能底盘、智能控制以及差分网络、偏分网络、分层反馈自主学习和智能安全反馈网络等关键问题展开深入研究,面向智能汽车核心系统构建可靠、可信、可验证的人工智能方法体系。
着重增强车辆控制系统在复杂工况和多源扰动条件下的自适应调节能力、模型可解释性与运行稳定性,提高感知—决策—控制链路之间的协同效率与闭环响应能力。
同时,面向车辆动力、制动、转向及底盘执行机构等核心部件,探索智能算法与控制机制的深度融合,为智能汽车核心系统的高效协同、安全运行和持续优化提供坚实技术支撑。
2. 汽车智能驾驶
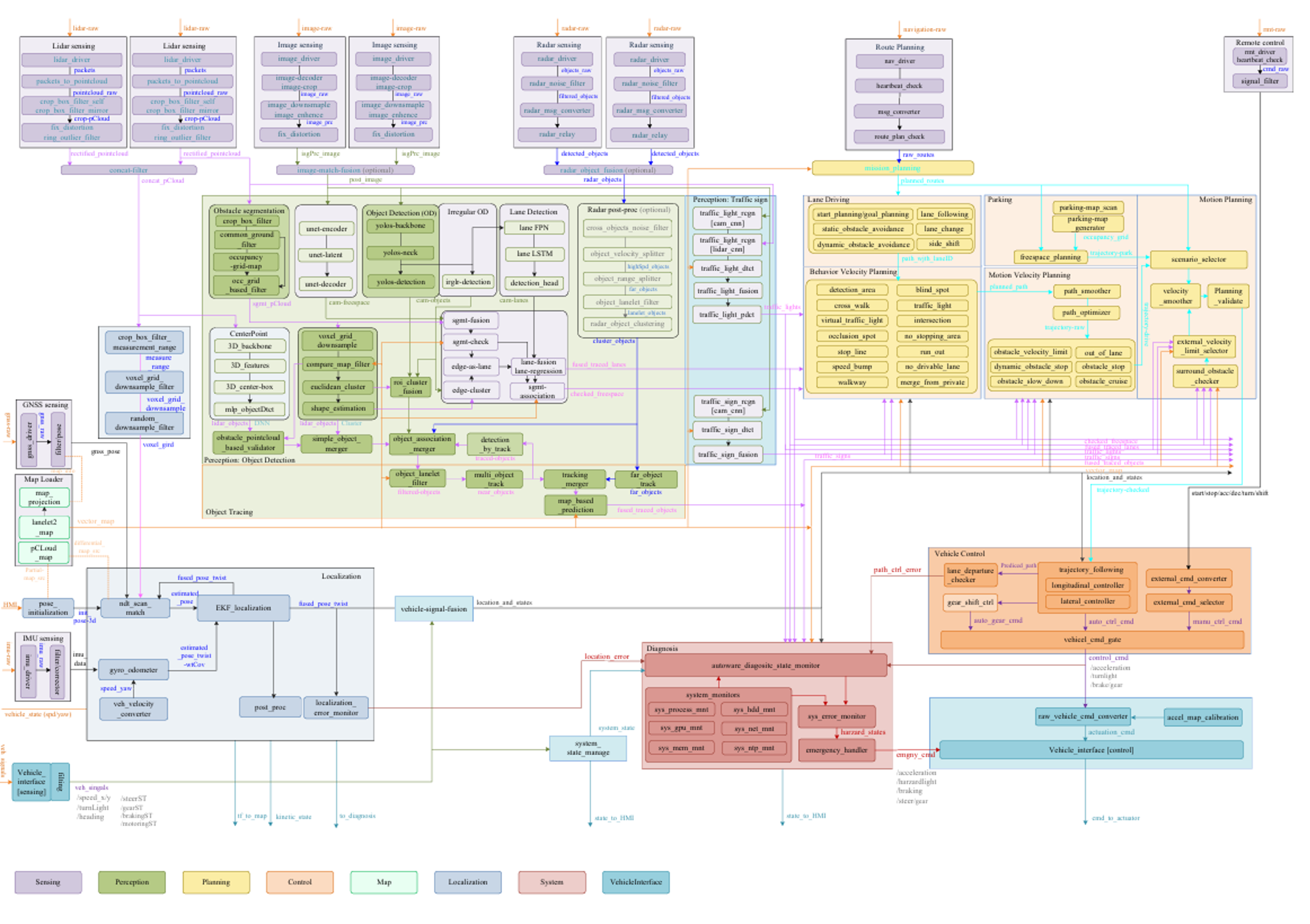
围绕环境感知、决策规划、路径优化、行为预测、端到端自动驾驶学习以及多传感器融合安全决策等核心问题展开系统研究,面向自动驾驶全栈系统构建安全可控、稳定可靠的智能驾驶技术体系。
重点提升复杂交通环境下对动态目标、异构道路场景和突发事件的实时感知与理解能力,增强决策规划模块在高动态、高不确定性条件下的鲁棒性与泛化能力,同时强化系统级安全冗余设计、故障诊断与风险规避机制,推动智能驾驶技术在城市道路、高速场景、园区物流及特种运输等多场景中的持续稳定应用。
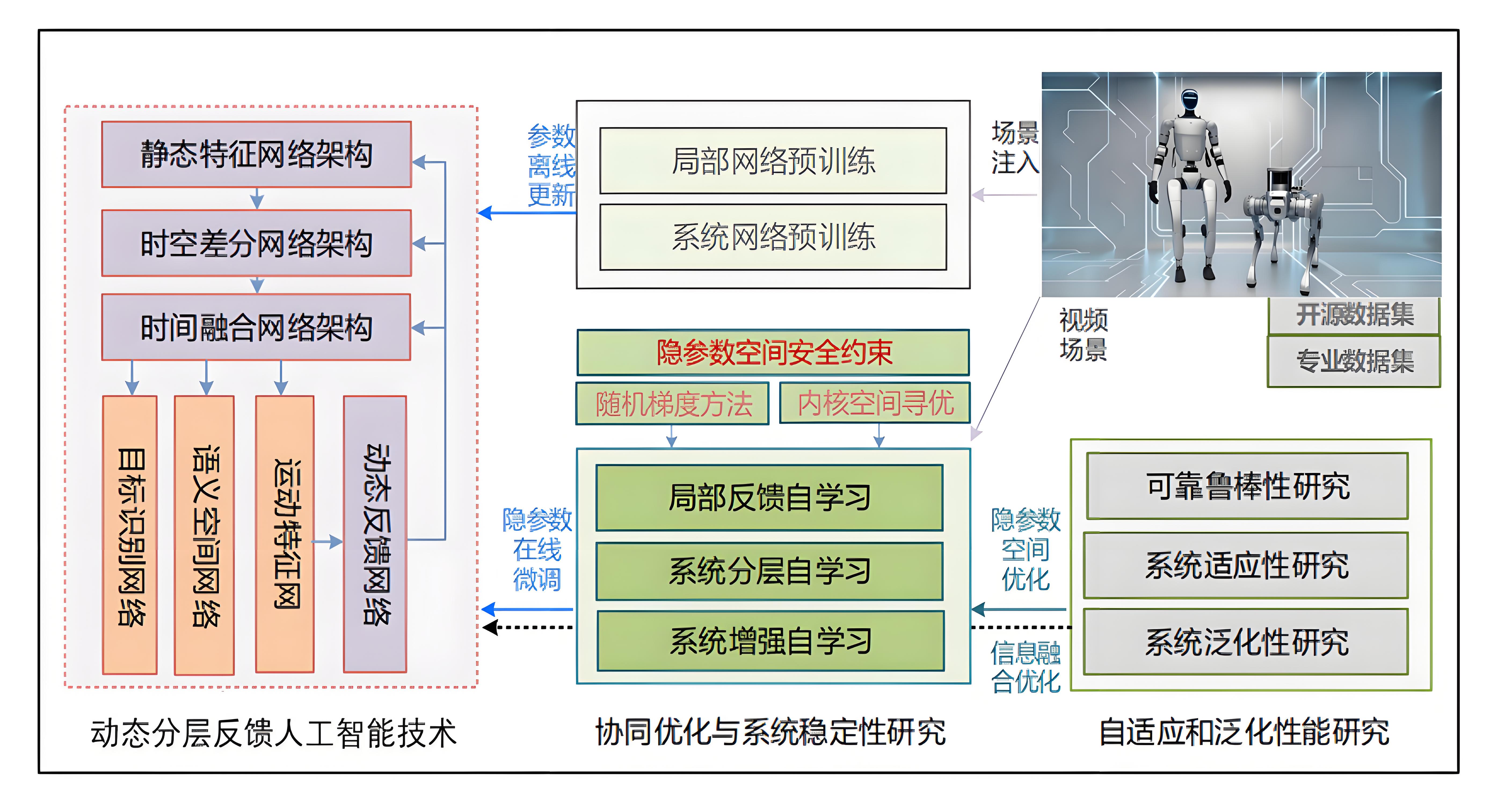
3. 智能机器人与机器狗系统研发及应用
聚焦多场景自主导航、柔性操作控制以及复杂环境下的稳定运动能力,围绕工业环境和非结构化环境中的定位、建图、导航、自主作业与复杂任务执行等关键能力开展研究。
重点突破视觉伺服、力觉控制、动态避障、多任务协同、仿生敏捷控制、多模态环境感知和自主路径规划等核心技术,推动机器人与机器狗系统在复杂场景中的智能化落地应用。
进一步提升其在高精度制造、设备巡检、仓储物流、应急救援、灾害勘测及公共服务等领域的适应性、稳定性和工程化应用价值。
4. 智能无人机集群与自主控制
围绕空地协同调度、集群协同作业、视觉SLAM、三维建模、自主任务规划与多机协同决策等方向展开研究,支撑无人机系统在环境感知、路径规划、协同控制和群体智能任务执行中的综合应用。
重点突破复杂环境下的自主飞行控制、动态任务分配优化、多机协同避碰、通信感知一体化及异构平台协作等关键技术,提升无人机集群在复杂地理环境、弱通信条件和突发任务场景下的自主性、稳定性与执行效率,进一步增强其在巡检监测、应急响应、灾害评估、资源搜索和空间信息获取等领域的应用能力与技术水平。
